






















 |
4 bieguny BLDC Planetary Brushless Dc Gear Motor dla mebli / medycyny / przemysłu
Szczegóły Produktu:
| Miejsce pochodzenia: | Dongguan Chiny |
| Nazwa handlowa: | UCHI |
| Orzecznictwo: | Completed |
| Numer modelu: | 42JXE100K/B4260 |
Zapłata:
| Minimalne zamówienie: | 1000 sztuk |
|---|---|
| Cena: | negocjowalne |
| Szczegóły pakowania: | Standardowy |
| Czas dostawy: | 5-7 dni |
| Zasady płatności: | T/T, Western Union |
| Możliwość Supply: | 5000 szt. szt. |
|
Szczegóły informacji |
|||
| Liczba słupów: | 4 | Zakres pracy: | 9 V ~ 16 V |
|---|---|---|---|
| moment obrotowy g.cm: | 370 | Zakres aplikacji: | meble/medycyna/przemysł |
| świadectwo: | 3C | Prędkość bez obciążenia obr./min: | 6000 |
| Prąd jałowy mA: | 680 | Prędkość znamionowa obr./min: | 5000 |
| Moc znamionowa W: | 19.0 | Liczba faz: | 3 |
| Podkreślić: | Silnik biegów prądu stałego bez szczotek do mebli,Silnik biegów prądu stałego bez szczotek medycznych,Przemysł silnik biegów planetarnych DC |
||
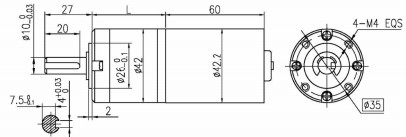
opis produktu
Dopuszczalny zakres obciążenia: 1N.m~10N.m
![]()
Dane techniczne silnika bez szczotki
| TYPU | Liczba z słupów |
Liczba fazy |
Działanie Zakres |
Rated napięcie VDC |
Bez obciążenia prędkość r/min |
Bez obciążenia prąd mA |
Rated moment obrotowy g.cm |
Rated prędkość r/min |
Rated prąd A |
Rated moc W |
||||||||||||||||
| B4260-1260 | 4 | 3 | 9V ~ 16V | 12 | 6000 | 680 | 370 | 5000 | 2.8 | 19.0 | ||||||||||||||||
| B4260-2460 | 4 | 3 | 9V ~ 26V | 24 | 6000 | 350 | 370 | 5300 | 1.4 | 20.1 | ||||||||||||||||
Dane techniczne silnika biegów bez szczotki
1.B4260-1260 Silnik BLDC
| Współczynnik redukcji | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Liczba pociągów biegów | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Długość ((L) | mm | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Prędkość bez obciążenia | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Prędkość nominalna | r/min | 1348 | 965 | 357 | 263 | 185 | 98 | 70 | 50 | 36 | 28 | 23 | 20 | 16 | 14 | 12 | 10 | |||||||||
| Moment obrotowy nominalny | N.m | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| Maks. dopuszczalne obciążenie w krótkim czasie | N.m | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
2. B4260-2460 Silnik BLDC
| Współczynnik redukcji | 3.7 | 5.2 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 181 | 219 | 254 | 306 | 354 | 427 | 495 | ||||||||||
| Liczba pociągów biegów | 1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | ||||||||||
| Długość ((L) | mm | 31.5 | 31.5 | 42.1 | 42.1 | 42.1 | 52.4 | 52.4 | 52.4 | 52.4 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | 62.9 | |||||||||
| Prędkość bez obciążenia | r/min | 1617 | 1158 | 429 | 316 | 222 | 118 | 85 | 60 | 43 | 33 | 27 | 24 | 20 | 17 | 14 | 12 | |||||||||
| Prędkość nominalna | r/min | 1429 | 1023 | 379 | 279 | 196 | 104 | 75 | 53 | 38 | 29 | 24 | 21 | 17 | 15 | 12 | 11 | |||||||||
| Moment obrotowy nominalny | N.m | 0.12 | 0.17 | 0.41 | 0.56 | 0.79 | 1.4 | 1.9 | 2.6 | 3.7 | 4.3 | 5.2 | 6.0 | 7.2 | 8.4 | 10 | 10 | |||||||||
| Maks. dopuszczalne obciążenie w krótkim czasie | N.m | 3 | 3 | 12 | 12 | 12 | 25 | 25 | 25 | 25 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | |||||||||
Diagram drutu
![]()
PIN 1# Feedback n=60 * F/P, gdzie F oznacza częstotliwość wyjścia zwrotu, a P 4 pary par słupów silnika.
PIN 2# Układ sterujący hamulcami
PIN 3 # regulacja prędkości PWM, wprowadzenie sygnału PWM 20~30kHz i regulacja prędkości silnika poprzez regulację cyklu pracy.
PIN 4# Obrót do przodu i do tyłu, obrót zawieszony jest CW, a zwarcie do obrotu naziemnego jest CCW.
PIN 5# Poł negatywny zasilania
Pozytywny biegun (niebieska linia) silnika jest podłączony do pozytywnego bieguna zasilania, a negatywny biegun (zielona linia) silnika jest podłączony do negatywnego bieguna zasilania.PIN3 # i PIN5 # są połączone i silnik działa z pełną prędkością.
Zgodnie z tym samym wymogiem, podczas przełączania do przodu i do tyłu, PIN3 #, PIN4 # i PIN5 # powinny być połączone ze sobą.
![]()
PIN 3 # regulacja prędkości PWM, wprowadzenie sygnału PWM 20~30kHz i regulacja prędkości silnika poprzez regulację cyklu pracy.
PIN 4#Obrót do przodu i do tyłu, obrót w zawieszeniu jest CW, a zwarcie do obrotu na ziemi jest CCW.
PIN 5#Poł negatywny zasilania